Assessing and Explaining Collision Risk in Dynamic Environments forAutonomous Driving Safety
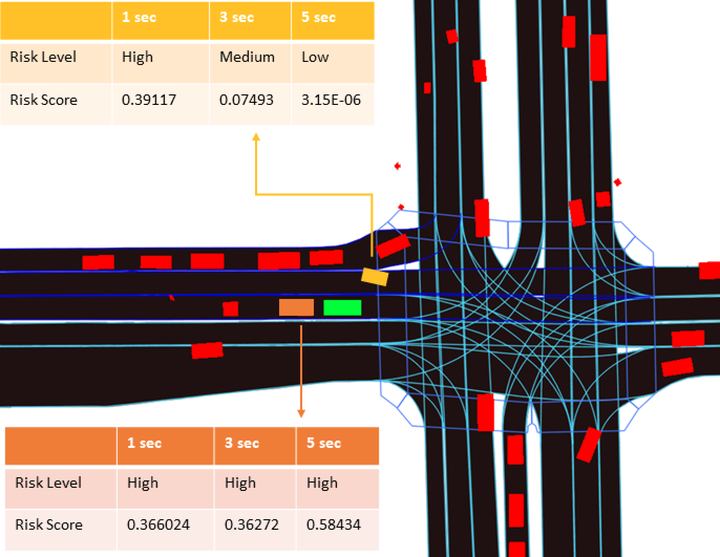 Lyft Level5 driving data instance
Lyft Level5 driving data instance
Abstract
Autonomous vehicles operating in dynamic environments are required to account for other traffic participants. By interpreting sensor information and assessing the collision risk with vehicles, cyclists, and pedestrians, near-misses and accidents can be prevented. Moreover, by explaining risk factors to developers and engineers the overall safety of autonomous driving can be increased in future deployments. In this paper, we have designed, developed, and evaluated an approach for predicting the collision risk with other road users based on a planar 2D collision model. To this end, we have trained interpretable machine learning models to classify and predict the risk of collisions on a range of features extracted from sensor data. Further, we present methods for inferring and explaining the factors mostly contributing to the risk. Using counterfactual inference, our approach allows us to determine the factors which highly influence the risk and should in turn be minimised. Experimental results on real-world driving data show that collision risk can be effectively predicted and explained for different time horizons as well as different types of traffic participants such as cars, cyclists and pedestrians.